自動配車計算を行う SAVS と、自動運転制御システムとの連携を実現した新バージョン“to-mak-oma-i”(苫小牧)をリリースしました。同時に、本機能を実装した小型電動自動車を用いたオンデマンド自動運転運行が、春日井市高蔵寺ニュータウン内で開始されました。
連携方式
クラウドベースのプラットフォームである SAVS と自動運転制御システムとの連携には2通りの方式が考えられます。
① サーバ間API通信連携(API 連携)
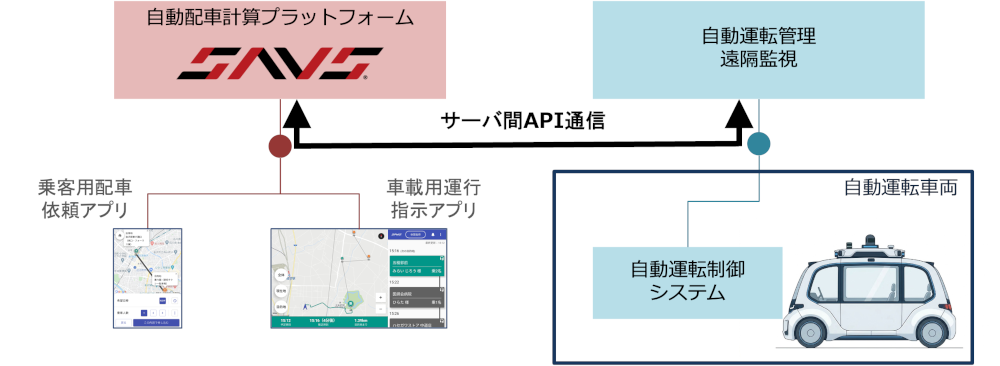
② 車両内ローカル通信連携(組み込み連携)
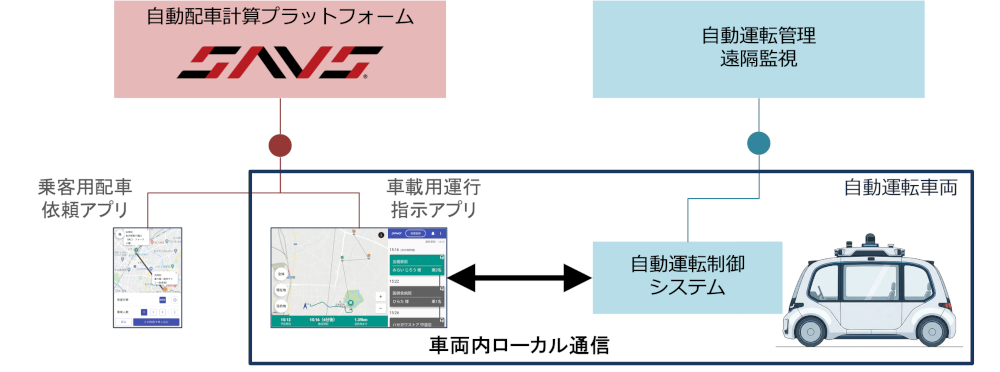
今回の取り組みでは、株式会社エクセイド社との共同により上記②の開発を進め、SAVSのドライバーアプリとエクセイド社の自動運転制御システム(ADENU)を車両内ローカル通信にて連携させました。この対応により、インターネット通信が不安定な状況下においても、運行指示アプリと自動運転制御システムが安定的に遅延なく連携し続けることができます。

また、ADENUが使用する精緻な道路ネットワークデータからSAVSの経路探索用道路ネットワークデータを生成する機構を備えているため、既に自動運転が行われている地域へオンデマンドサービスを短期間で導入することができます。
高蔵寺ニュータウン オンデマンド自動運転
愛知県春日井市高蔵寺ニュータウンでは、春日井市と名古屋大学モビリティ社会研究所を中心とした産学官連携による、様々な先導的モビリティを活用したまちづくりに取り組んでいます。ニュータウン内の石尾台地区では、小型電動自動車(ヤマハカート)にエクセイド社の自動運転制御システムを取り付け、地域NPOスタッフの安全管理の元に、公共ライドシェアの枠組みにおいて Door to Door で地域住民の送迎を行っています。新バージョンのSAVSの導入により、レベル2の自動運転区間と手動運転区間それぞれのルートを一体的に案内し、リアルタイム配車の特徴を活かした、当日の急な乗車時刻変更や飛び込み利用にも対応したオンデマンド自動運転運行が可能となりました。

関連リンク
- 春日井市:先導的モビリティに関する取組
- 地方創生(内閣官房・内閣府総合サイト):高蔵寺ニューモビリティタウン構想事業
SAVS バージョン履歴
| リリース | バージョン | 主な追加機能・特徴 |
|---|---|---|
| 2026 | to-mak-oma-i(苫小牧) | 自動運転車両制御システムと連携 |
| 2026 | nupur-pet(登別) | 経由地点のGTFSデータインポートによる設定 |
| 2025 | mo-ruerani(室蘭) | マップマッチング処理と道路ごとの速度設定 |
| 2024 | to-ya(洞爺) | 経由地点の設定、複数の運行形態車両の混在 |
| 2024 | o-samampe(長万部) | ビームサーチ対応した確定的アニーリング法の導入 |
| 2023 | yu-rap(遊楽部) | 小休止デマンド(ドライバーのひとやすみ時間取得)対応 |
| 2022 | kaya-un-pe-nupuri(駒ヶ岳) | クラウド版シミュレーター、SAVS OS 提供開始 |
| 2021 | tu-pok-ke(椴法華) | 外部有償地図情報(交通規制や渋滞統計等)を利用した配車計算 |
| 2020 | ye-san(恵山) | MaxSAT対応型アルゴリズム 提供、物流・貨客混載利用 開始 |
| 2018 | toy-o-i(戸井) | 確定的アニーリング処理によるバッチ配車計算サービス提供開始 |
| 2017 | yu-pet(湯の川) | API 接続型クラウドプラットフォーム提供開始 |
| 2016 | us-kes(函館) | 未来シェアからのサービス提供開始、東京実験 にて利用 |
| 2015 | mo-peci(茂辺地) | クラウドサービスへ移行、人工知能学会 函館大会 にて実験運行 |
| 2013 | rir-o-nay(木古内) | はこだて未来大学による初回実験、世界初の完全自動・リアルタイム・フルデマンド運行実施 |
| 2002 | mat-oma-i(松前) | 逐次最適挿入法によるマルチエージェント・シミュレーション |