SAVS が制御する各運行車両に対して、経由地点と経由時刻を設定する機能を搭載した新バージョン “to-ya”(洞爺)をリリースしました。
本機能と、運行範囲の定義や各車両の運行開始・終了地点等の組み合わせ等により、様々な運行形態の車両を混在させた、きめ細かい交通計画の策定と高度なモビリティの実現が可能となりました。
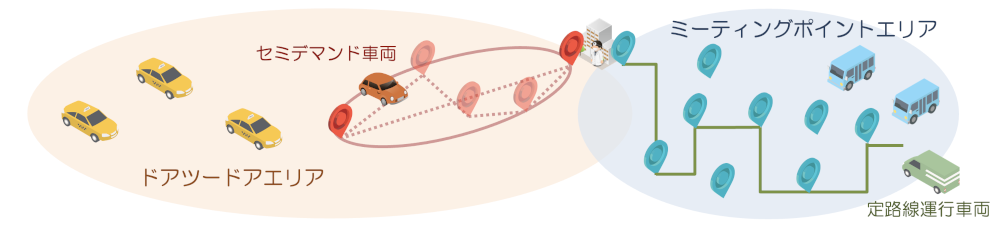
組み合わせ例 1 :フルデマンド ▶︎ セミデマンド ▶︎ 定路線 への運行形態変化
![]()
組み合わせ例 2 : 曜日・時間帯別、エリア別、複数の運行形態車両の混在
期待できる効果
1. 全体最適としての満足度の向上
通勤、通学、通院、観光、イベントなど、利用が集中する時間帯に、特定の大型車両の経由地として主要施設を設定し優先的に乗客を割り当てることにより、その他の車両に余裕が生まれ、全体的な稼働率の向上が見込まれます。
2. シミュレーションによるエビデンスに基づいた交通政策の立案
本機能はSAVS OS(オペレーション シミュレーター)による効果測定でも利用できます。運行形態を混在させる車両の割合、セミデマンドや定路線運行のルート、ミーティングポイントや経由地点の違いによる効果を、仮想都市空間において短時間の内に精密かつ正確に調査、測定ができるので、どのような地域や状況においても、どなたでも容易にエビデンスに基づいた交通政策を立案できるようになります。
SAVS バージョン履歴
| リリース | バージョン | 主な追加機能・特徴 |
|---|---|---|
| 2024 | to-ya(洞爺) | 経由地点の設定、複数の運行形態車両の混在 |
| 2024 | o-samampe(長万部) | ビームサーチ対応した確定的アニーリング法の導入 |
| 2023 | yu-rap(遊楽部) | 小休止デマンド(ドライバーのひとやすみ時間取得)対応 |
| 2022 | kaya-un-pe-nupuri(駒ヶ岳) | クラウド版シミュレーター、SAVS OS 提供開始 |
| 2021 | tu-pok-ke(椴法華) | 外部有償地図情報(交通規制や渋滞統計等)を利用した配車計算 |
| 2020 | ye-san(恵山) | MaxSAT対応型アルゴリズム 提供、物流・貨客混載利用 開始 |
| 2018 | toy-o-i(戸井) | 確定的アニーリング処理によるバッチ配車計算サービス提供開始 |
| 2017 | yu-pet(湯の川) | API 接続型クラウドプラットフォーム提供開始 |
| 2016 | us-kes(函館) | 未来シェアからのサービス提供開始、東京実験 にて利用 |
| 2015 | mo-peci(茂辺地) | クラウドサービスへ移行、人工知能学会 函館大会 にて実験運行 |
| 2013 | rir-o-nay(木古内) | はこだて未来大学による初回実験、世界初の完全自動・リアルタイム・フルデマンド運行実施 |
| 2002 | mat-oma-i(松前) | 逐次最適挿入法によるマルチエージェント・シミュレーション |










